触れるVRを目指して ~senso glove DK2買ってみた話 その4 ハンドトラッキング実験~
1.前提条件・機材解説
2.導入
3.unityでのhaptic実験
4.unityでのハンドトラッキング実験 ← イマココ
5.メイン検証
手首より先の動作は導入編に書いたので肘のトラッキングを目指します.
いろいろ試行錯誤した結果,wristのセンサーの値がそれっぽいです.
まず,SensoHandExampleに赤字を追記.
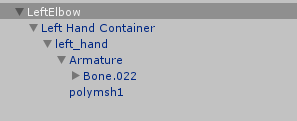
動かす肘替わりに空のオブジェクトLeftElbowを作って,下記の通り構造化
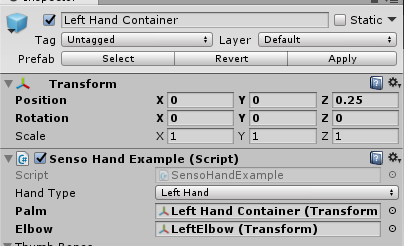
そして,LeftElbowをアタッチすればOK
これでチュートリアル同様かなりざっくり,肘が動きます.
続く
2.導入
3.unityでのhaptic実験
4.unityでのハンドトラッキング実験 ← イマココ
5.メイン検証
〇Vive無しでは完璧なトラッキングはできない
導入編に書いた通り,動作するのは肘より先だけ.手首より先の動作は導入編に書いたので肘のトラッキングを目指します.
いろいろ試行錯誤した結果,wristのセンサーの値がそれっぽいです.
まず,SensoHandExampleに赤字を追記.
40: Palm.localRotation = /*(Quaternion.Inverse(wq) */ aData.PalmRotation;
41: Palm.localPosition = offset; //viveがないと無駄
42: Elbow.localRotation = aData.WristRotation; //viveがあるなら不要
41: Palm.localPosition = offset; //viveがないと無駄
42: Elbow.localRotation = aData.WristRotation; //viveがあるなら不要
動かす肘替わりに空のオブジェクトLeftElbowを作って,下記の通り構造化
そして,LeftElbowをアタッチすればOK
これでチュートリアル同様かなりざっくり,肘が動きます.
続く